Początkowo roboty były produkowane do wykonywania różnych czynności związanych z przenoszeniem materiałów, oparte były na prostej sekwencji ruchów z punktu A do punktu B i nie posiadały żadnych zewnętrznych czujników. Dopiero wykorzystanie robotów do bardziej skomplikowanych czynności takich jak spawanie czy montaż skłoniło konstruktorów do projektowania robotów o bardziej skomplikowanych ruchach , a także do wyposażenia ich w czujniki.
Robotyka to stosunkowo nowa dziedzina nauki łącząca zagadnienia mechaniki, sterowania, projektowania, pomiarów oraz eksploatacji manipulatorów i robotów. Zakres stosowania manipulatorów i robotów jest bardzo szeroki, gdyż znalazły zastosowanie niemal w każdej dziedzinie. Obecnie jedynie aspekty ekonomiczne mogą ograniczać proces rozwoju przemysłu poprzez robotyzację.
Jednym z kluczowych pojęć związanych z dziedziną robotyki jest pojęcie maszyny cybernetycznej. Taka maszyna to urządzenie przeznaczone do częściowego lub całkowitego zastępowania funkcji energetycznych, fizjologicznych i intelektualnych człowieka. Zastąpienie funkcji fizycznych to zastąpienie pracy fizycznej, funkcji fizjologicznych to zastąpienie organów, a zastąpienie funkcji intelektualnych należy rozumieć jako właściwości adaptacyjne maszyny w zmieniającym się środowisku.
Manipulator to pojęcie określające mechanizm cybernetyczny, którego przeznaczeniem jest realizacja niektórych funkcji kończyny górnej człowieka. Wyróżnia się dwa rodzaje funkcji manipulatora: manipulacyjną – realizowaną przez chwytak i wysięgnikową – wykonywaną poprzez ramię manipulatora. Z kolei pedipulator to kończyna dolna maszyny kroczącej, która może być układem jedno lub kilkuczłonowym.
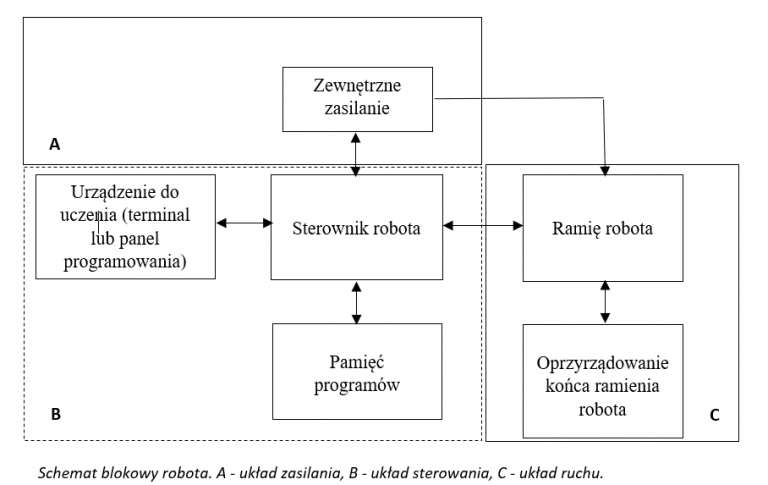
Schemat blokowy robota przedstawia poniższy rysunek.